
[OS] 프로세스 동기화
- 전 포스팅 《 IPC (프로세스간 통신) 》에서 임계 구역에 대해 살펴보았다.
- 이 포스팅에서 설명 하려는 것은 아래와 같다.
- “경쟁 상태는 문제이다. 왜? 데이터의 일관성을 보장할 수 없기 때문이다. 그럼 어떻게 해결할건데?” → 프로세스 동기화!
- 프로세스 동기화란 하나의 자원을 한 순간에 하나의 프로세스만이 이용하도록 제어하는 것이다.
- 경쟁 상태가 무엇인지 먼저 살펴보자!
▶ 경쟁상태와 임계구역
- 공유된 자원에 여러 프로세스/스레드가 동시에 접근하려고 하면 임계 구역 안에서 경쟁 상태가 생길 수 있다.
- 경쟁상태(race condition) : 두 개 이상의 프로세스가 공유 자원을 가지고 경쟁하는 상태
- 임계구역(Critical Section (CS)) : 공유 자원 접근 순서에 따라 실행 결과가 달라지는 영역, 공유 자원이 속해있어 경쟁 상태가 발생할 수 있는 영역 -> 한 번에 하나의 프로세스만 접근할 수 있도록 보장해줘야함!
- ex. 주방에서 가스레인지는 공유가 가능한 자원이지만, 믹서기를 사용할 때는 순서를 지켜야 하므로 공유가 불가능한 자원이므로 CS(임계구역) 이다.
- 경쟁상태(race condition) : 두 개 이상의 프로세스가 공유 자원을 가지고 경쟁하는 상태
▶ 버퍼문제
- 생산자 - 소비자 문제는
empty와buffer full을 구별할 수 없는 문제가 발생한다. 이에 대한 해결책으로
BUFFER_SIZE-1만큼 사용 가능하도록 하여 문제를 해결한다. 하지만, 이 방법은 버퍼의 한 자리는 절대 채울 수 없다. 《 IPC (프로세스간 통신) 》참고하기- 정수 카운터를 통해서 버퍼가 다 찼는지 살펴본다. 카운터 변수를 사용하여 버퍼를 끝까지 채울 수 있게 된다!
하지만, 카운터를 사용했을 때도 경쟁상태로 인한 공용데이터 값의 불일치 문제가 발생하게 된다.
▷ Counter 버퍼 문제
- 카운터 값을 변경할 때는 아래의 과정을 거친다.
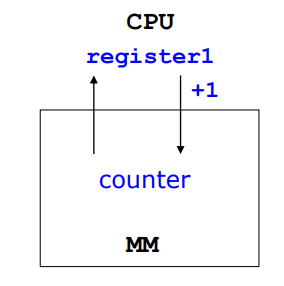
- counter++ 연산
register1 = counter; // 현재 카운터 값을 레지스터에 넣고
register1 = register1 + 1; // 레지스터 값에 1을 더한다음에 다시 레지스터 값에 넣어 저장
counter = register1; // 카운터 값을 변경
- counter– 연산
register1 = counter; // 현재 카운터 값을 레지스터에 넣고
register1 = register1 - 1; // 레지스터 값에 1을 뺀다음에 다시 레지스터 값에 넣어 저장
counter = register1; // 카운터 값을 변경
- counter++, counter– 연산을 동시에 한 상황을 살펴보자
- 공유 변수(counter)를 병렬적으로 사용 -> 경쟁상태
- 즉, 실행 순서에 의해 값이 달라짐 -> 임계구역 문제 발생
S0: producer execute register1 = counter {register1 = 5} // register1 = 5 S1: producer execute register1 = register1 + 1 {register1 = 6} // register1 = 6, 아직 counter 변수 저장 x S2: consumer execute register2 = counter {register2 = 5} // register2 = 5 S3: consumer execute register2 = register2 – 1 {register2 = 4} // register2 = 4, 아직 counter 변수 저장 x S4: producer execute counter = register1 {counter = 6 } // counter = 6 S5: consumer execute counter = register2 {counter = 4} // counter = 4
▶ 임계구역 해결 방법
▷ 임계구역 문제
- 위 코드에서 살펴봤듯, 공유 자원 접근 순서에 따라 실행 결과가 달라진다는 것을 확인했다.
-
그럼 임계 영역 문제를 어떻게 해결할 수 있을까?
-
3가지 조건을 동시에 충족해야한다.⭐
- 상호 배제 (Mutual Exclusive)
- 한 번에 하나의 프로세스만 임계구역에 들어갈 수 있음 (화장실 둘이 들어갈 수 없잖아..?😲)
- 진행 (Progress)
- 임계 영역에 들어간 프로세스가 없고, 대기하는 프로세스만 있으면 대기가 무한대로 연기될 수 없음
- 즉, 무조건 프로세스 하나는 진행해야함
- 한정된 대기 (Bounded Waiting)
- Starvation(기아)를 방지하기 위해 일정 시간 대기하면 들어갈 수 있음
- 상호 배제 (Mutual Exclusive)
➡️ 임계 구역의 동시 접근을 해결하기 위해 Lock(잠금), peterson’s Algorithms(피터슨 알고리즘), Semaphore(세마포어) 와 같은 방법이 있다.
▷ S/W적 CS 문제 해결
① peterson’s Algorithms⭐⭐
프로세스 2개가 경쟁하는 상황에서 사용되는 솔루션이다. (두 개의 프로세스만 비교 가능하다는 한계 존재)
- 가정: load 와 store 기계 명령어를 수행할 땐, 인터럽트가 걸리지 않는다.
- 사용되는 변수 (두 가지)
- turn
- 차례를 나타내는 변수
- 임계 구역에 들어갈 프로세서가 P0인지, P1인지 결정
- 0 또는 1 이 저장된다.
- flag
- 프로세스가 임계구역에 들어갈 준비가 되었는지 나타내는 변수
flag[0]=true: P0(프로세스0)이 임계 구역에 들어갈 준비가 되었음을 의미flag[1]=true: P1(프로세스1)이 임계 구역에 들어갈 준비가 되었음을 의미
- turn
flag[0] = false; // false은 임계 구역 사용을 원하지 않음을 뜻함.
flag[1] = true;
turn = 0; // 0 은 0번 프로세스를 가리킴, 1은 1번 프로세스를 가리킴
예시 1 ⭐⭐
- 첫 번째 프로세스 (P0)에 대한 코드
P0: flag[0] = true // 임계 구역 사용을 원함
turn = 1 // 1번 프로세스에게 차례가 감
while( flag[1] && turn == 1 )
{
// flag[1] 이 turn[1] 을 가지고 있으므로 현재 사용중임
// 임계 구역이 사용 가능한지 계속 확인
}// 임계 구역
...
// 임계 구역의 끝
flag[0] = false // 사용 완료시 false로 바꿔준다.
- 두 번째 프로세스 (P1)에 대한 코드
P1: flag[1] = true // 임계 구역 사용을 원함
turn = 0 // 0번 프로세스에게 차례가 감
while( flag[0] && turn == 0 )
{
// 임계 구역이 사용 가능한지 계속 확인
}// 임계 구역
...
// 임계 구역의 끝
flag[1] = false // 사용 완료시 false로 바꿔준다.
예시 2 ⭐⭐
- 첫 번째 프로세스 (Pi)에 대한 코드
Pi: flag[i] = true // 임계 구역 사용을 원함
turn = j // j번 프로세스에게 차례가 감
while( flag[j] && turn == j )
{
// flag[j] 이 turn[j] 을 가지고 있으므로 현재 사용중임
// 임계 구역이 사용 가능한지 계속 확인
}// 임계 구역
...
// 임계 구역의 끝
flag[i] = false // 사용 완료시 false로 바꿔준다.
- 두 번째 프로세스 (Pj)에 대한 코드
Pi: flag[j] = true // 임계 구역 사용을 원함
turn = i // i번 프로세스에게 차례가 감
while( flag[i] && turn == i )
{
// flag[j] 이 turn[j] 을 가지고 있으므로 현재 사용중임
// 임계 구역이 사용 가능한지 계속 확인
}// 임계 구역
...
// 임계 구역의 끝
flag[j] = false // 사용 완료시 false로 바꿔준다.
▷ H/W적 CS 문제 해결⭐
① Locking 🔒
- 위에서 살펴본 피터슨 알고리즘과 같은 S/W 해결방법에는 한계가 있기 때문에, H/W 방법을 사용한다.
- Locking 기법으로 CS문제를 해결해야 한다. ⇒ H/W적 해결을 해야한다.
- H/W적 해결의 핵심
- atomic(원자적) 기계 명령어 사용
- 인터럽트가 되지 않는 특수한 명령어를 사용한다.
- 임계 구역이 존재할 때 하나의 프로세스가 CS(임계구역) 내에 있으면, 자물쇠를 걸어 다른 프로세스들은 CS에 들어오지 못하게 하는 방식이다. (화장실 하고 같은 상황)
- Locking 기법의 기본 방식
acquire lock- lock을 얻는 부분
- lock을 얻어야만 CS영역에 진입할 수 있다.
release lock- lock을 반환하는 부분
- CS 실행 완료 시, lock을 돌려준다.
- 아래와 같이 나타낼 수 있다.
- 임계 구역이 열렸는지 닫혔는지 확인
- 열렸으면 들어가도 됨
- 내가 들어가면서 닫음 (Lock → 무한 루프 문으로 구현)
- 실행을 마치고 열고 나감
do{
acquire lock // lock을 얻는 부분 - CS영역에 진입가능
critical section
release lock // lock을 반환하는 부분 - CS 실행 완료 시, lock을 돌려준다.
remainder section
} while (TRUE);
② Mutex Locks
- 등장 배경
- 기존 Lock을 사용하는 방식들은 복잡해서 Mutex Locks이라는게 등장했다!
- 다른 Lock 방식에 비해, 간단하다.
- 개념
- 공유된 자원의 cs에 하나의 Process 혹은 Thread가 접근하는 것을 막아준다. (즉, 동기화 대상이 하나)
- ex. 데바데 게임으로써 살해(처형) 상태와 생존(도주) 상태가 둘 중 하나만 적용되어야 하는데 동시에 적용이되어서 살해당한 시체가 성공적으로 살인마한테서 도주하여 생존하는 오류가 발생하였다. 두 상태가 동시에 적용되지 않아야 할때 이를 방지하기 위해 사용하는게 뮤텍스(상호배제)이다.
- 공유 자원을 사용중인 스레드가 있을 때, 다른 스레드가 공유 자원에 접근한다면 Blocking 후 대기 큐로 보낸다.
- 즉, 바쁜 대기를 통해 lock을 얻으려고 시도하지만, 다른 스레드가 lock을 해제할 때까지 대기 큐를 사용하여 다른 스레드를 대기시키는 것이다.
- 공유된 자원의 cs에 하나의 Process 혹은 Thread가 접근하는 것을 막아준다. (즉, 동기화 대상이 하나)
- 사용 함수
acquire(): lock 획득release(): lock 반환
- Mutex Locks의 문제점
- 다른 Lock 방식들과 마찬가지로, Busy Waiting 방식을 사용한다.
- Busy Waiting
- 특징 : while문을 계속 돌며, CS 진입을 대기하는 것, “지금 자리 있어? 나 들어가도 될까? 계속 물어봄”,
- 단점 : 반복문을 반복하기 때문에 계속적으로 Context Switching이 발생하며 이로 인해 오버헤드가 발생한다.
③ spinlock
- 개념
- 기본적으로 뮤텍스와 Busy Waiting을 하기 때문에 유사하다고 볼 수 있다.
- 하지만, 대기 큐를 갖지 않는다.
- 대기큐를 갖지 않으면 비효율적인거 아니야 언제 사용하지?
- 컨텍스트 스위칭 시간이 짧을 때
- ex. 대기실까지 이동하는 시간보다 식다엥 진입하게 될 시간이 더 짧을 때
- 멀티 코어 프로세스일 때
- ex. 직원이 여러 명 있는 식당일 때 (계속해서 지금 자리 있어? 라고 물어보는 손님을 상대하는 직원이 존재할 떄)
- 컨텍스트 스위칭 시간이 짧을 때
④ Semaphore (세마포어)⭐
-
개념
- 세마포어란 깃발🚩 수기 신호이다. 여러 대의 기차가 하나의 철로를 공용하여 쓸 때, 오직 하나만 지나갈 수 있도록 하기 위해 양쪽 끝 선에 깃발 표시를 하여 사고가 안나게 하였던 장치이다.
- 공유된 자원의 cs에 여러 Process 혹은 Thread가 접근하는 것을 막아준다. (즉, 동기화 대상이 여러개)
- ex. 식당(CS)에 여러 명의 손님 입장 가능
- CS에 진입한 순간 진입한 스레드는 P라고 외치고, 나갈 땐 V라고 외친다.
- ex. 식당에 진입한 순간 진입한 손님은 p라고 외치고 나가는 손님은 v라고 외친다!
-
문제점
- 데드락(deadlock) 또는 기아(Starvation) 발생 가능성 (LIFO 형태로 제거할 경우)
- CS 진입을 프로세스들은 2가지 방식으로 기다릴 수 있다!
- 즉, 세마포어를 사용하면 Busy Waiting 방식을 사용하지 않아도 된다.
- sleep wating 방식
대기 큐를 사용하여 사용 가능한 자원이 생기면 진입을 허가하는 방식
- Busy Waiting (=spin lock) 방식
- 어떠한 프로세스가 먼저 임계 구역에 진입을 할 수 있을지에 대한 처리를 할 수 없다.
- 음수의 값만큼 대기하는 프로세스가 있다는 뜻
- 뮤텍스 vs 세마포어
- 뮤텍스(Mutex) : 공유된 자원의 cs에 하나의 Process 혹은 Thread가 접근하는 것을 막아준다. (즉, 동기화 대상이 하나)
- 세마포어(Semaphore) : 공유된 자원의 cs에 여러 Process 혹은 Thread가 접근하는 것을 막아준다. (즉, 동기화 대상이 여러개)
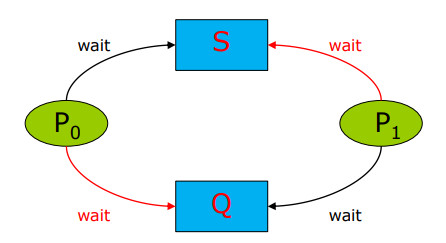
▷ Deadlock
- 개념
- 교착 상태
- 두 개 이상의 프로세스가 서로 상대방의 작업이 끝나기 만을 기다리고 있기 때문에, 무한 대기 상태에 빠지는 상태
▷ 우선순위 역전(Priority Inversion)
우선순위가 가장 높은 프로세스 A, 중간인 B, 가장 낮은 C가 존재할 때,
-
프로세스A가 CS 영역을 사용하고자 할 때, 프로세스 C가 CS 영역을 이미 사용 중이라면, 프로세스 C가 lock을 걸어 놨기 때문에 프로세스A는 우선순위가 높더라도 대기 상태에 들어가야한다.
-
이 타이밍에 공유자원을 필요로 하지 않는 B가 작업을 수행하기 위해서 오게 된다. B는 C보다 우선순위가 더 높은 프로세스이고 공유자원 또한 필요로 하지 않는 프로세스 이기 때문에 C는 하던 작업을 멈추고 B에게 CPU를 내어주게 된다.
-
결국 B가 작업을 모두 완료한 후, 다시 C가 작업을 진행하게 되고 최종적으로 A가 진행되어 진다.
➡️ 이렇듯, 상대적으로 우선순위가 가장 높은 프로세스인 ‘A’가 마치 우선순위가 가장 낮은 프로세스처럼 실행이 되는 현상인 우선순위 역전이 일어나게 된다.
➡️ 즉, 공유자원에 대한 lock에 대한 개념 때문에 발생하는 현상이다.
우선순위 역전 문제 해결 방법 : 우선순위 상속
- 낮은 우선순위 프로세스 C가 높은 우선순위 프로세스 A의 우선순위를 상속받아, CS를 실행한 후 Lock을 풀고 원래 우선순위로 복귀하는 것이다.(일시적으로 우선순위 높여줌)
- 이렇게 상속을 사용한다면, 낮은 우선순위 프로세스 C는 프로세스 B의 방해를 받지 않고 우선순위를 일시적으로 높여서 빨리 처리되도록 할 수 있다.
📎참조
- 성결대학교 강영명 교수님 운영체제 (2023)
- 『 Operating System Concept 10th 』
- https://taegyunwoo.github.io/os/OS_SynchronizationTools
- https://gooweon.tistory.com/147
- https://velog.io/@octo__/%EC%84%B8%EB%A7%88%ED%8F%AC%EC%96%B4Semaphore
- https://jwprogramming.tistory.com/13
- https://www.youtube.com/watch?v=oazGbhBCOfU ⭐추천
- https://namu.wiki/w/%EC%84%B8%EB%A7%88%ED%8F%AC%EC%96%B4
- https://yabmoons.tistory.com/663
- https://taeyoungcoding.tistory.com/m/369
- https://ko.wikipedia.org/wiki/%ED%94%BC%ED%84%B0%EC%8A%A8%EC%9D%98_%EC%95%8C%EA%B3%A0%EB%A6%AC%EC%A6%98
댓글남기기